Projects
Through my internships and coursework, I was fortunate to work on many projects which developed my skills in: system design, hardware integration, embedded systems, experimentation, coding, and data analysis.
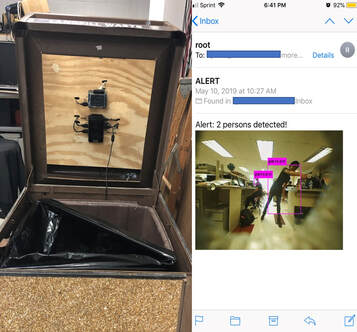
TrashCam: A Portable Security Camera System with Computer Vision-based Alerts
For our final project in Cornell ECE 5725, we designed and built a covert camera system capable of object detection with the ability to capture a full 360 degree view at detection rate of 2 frames per second (fps). To achieve this, we designed our system using a Raspberry Pi model 3B along with a PiTFT display, three USB cameras, and a USB hub. Detection was performed using the YOLOv3 object detection algorithm. Our system was integrated into a typical outdoor trashcan to satisfy the requirement of being covert. This also allows it to be portable. We implemented an email alert system as well so that the user does not need to continuously watch surveillance footage to find what they wish to be detected.
For our final project in Cornell ECE 5725, we designed and built a covert camera system capable of object detection with the ability to capture a full 360 degree view at detection rate of 2 frames per second (fps). To achieve this, we designed our system using a Raspberry Pi model 3B along with a PiTFT display, three USB cameras, and a USB hub. Detection was performed using the YOLOv3 object detection algorithm. Our system was integrated into a typical outdoor trashcan to satisfy the requirement of being covert. This also allows it to be portable. We implemented an email alert system as well so that the user does not need to continuously watch surveillance footage to find what they wish to be detected.
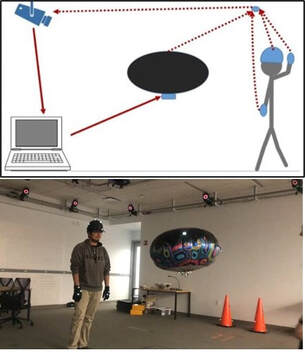
Human Blimp Interaction Study
Research has been done to understand how humans interpret drone motion. Blimps have certain advantages over drones such as longer battery life, quieter propellers, and safe-to-touch envelops. Thus, we wanted to understand if humans are able to interpret blimp motion similar to interpretations of drone motion. We developed a system using a motion capture system, a modified commercial blimp, and ROS to test our theory. We developed a decision tree for the blimp to predict whether the human would properly execute a given command. This project satisfied the final project component for Cornell MAE 6710.
Research has been done to understand how humans interpret drone motion. Blimps have certain advantages over drones such as longer battery life, quieter propellers, and safe-to-touch envelops. Thus, we wanted to understand if humans are able to interpret blimp motion similar to interpretations of drone motion. We developed a system using a motion capture system, a modified commercial blimp, and ROS to test our theory. We developed a decision tree for the blimp to predict whether the human would properly execute a given command. This project satisfied the final project component for Cornell MAE 6710.
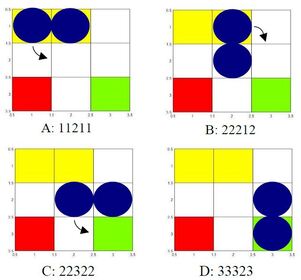
Automatic Controller Synthesis for a Two-Link Modular Robot
I developed a framework to automatically generate the mid level control needed to create a guaranteed safe, navigable, path in an obstacle-filled environment from just a high level task specification. A specification in Linear Temporal Logic (LTL) is input. This LTL specification is then converted to a Buchi automaton (state machine) which ensures the specification will be satisfied. A transition map of the possible ways the robot can move in the world is developed. Composing the Buchi automaton with the transition map produces a product automaton which can be searched over using standard graph theory techniques to find a guaranteed safe path to the goal. I completed this project for Cornell MAE 6770.
I developed a framework to automatically generate the mid level control needed to create a guaranteed safe, navigable, path in an obstacle-filled environment from just a high level task specification. A specification in Linear Temporal Logic (LTL) is input. This LTL specification is then converted to a Buchi automaton (state machine) which ensures the specification will be satisfied. A transition map of the possible ways the robot can move in the world is developed. Composing the Buchi automaton with the transition map produces a product automaton which can be searched over using standard graph theory techniques to find a guaranteed safe path to the goal. I completed this project for Cornell MAE 6770.
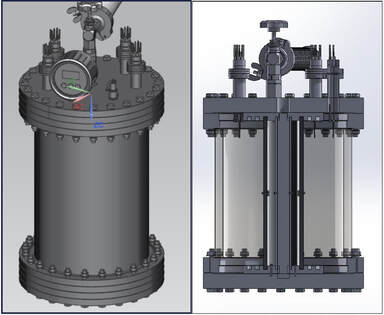
Howard University Senior Capstone Project: Heat Transfer Inside a Dual-Axial Concentric Chamber
I led a team of four students, then merged to co-lead a team of eight. We designed and built an apparatus to test thermal radiation transfer between metallic concentric cylinders in a vacuum environment. As a team lead, I identified and delegated tasks to my teammates. I also coordinated with manufacturers, team members, and our sponsors Sandia National Laboratories to meet specifications and our deadline. On the technical side, I worked on the system design, LabVIEW programming and data acquisition, and basic stress calculations. We presented our midyear results to our sponsors at their facilities in Albuquerque, NM, and our final results at the end of the year senior presentations at Howard University.
I led a team of four students, then merged to co-lead a team of eight. We designed and built an apparatus to test thermal radiation transfer between metallic concentric cylinders in a vacuum environment. As a team lead, I identified and delegated tasks to my teammates. I also coordinated with manufacturers, team members, and our sponsors Sandia National Laboratories to meet specifications and our deadline. On the technical side, I worked on the system design, LabVIEW programming and data acquisition, and basic stress calculations. We presented our midyear results to our sponsors at their facilities in Albuquerque, NM, and our final results at the end of the year senior presentations at Howard University.
Quadrature Optical Linear Encoder Measurement System Development for Photometry Bench Modification
As an intern at the Boeing Company in the Metrology group, I designed, implemented, and tested a proof-of-concept system to replace the current laser interferometer measurement system with a more cost efficient optical encoder. This system was to be used in the Photometry Lab to measure the light properties of various components for the airplanes' interior cabin and ensure they were within FAA specifications. For this project I did the programming, bracket design, and electronics and presented my findings at the conclusion of my internship.
As an intern at the Boeing Company in the Metrology group, I designed, implemented, and tested a proof-of-concept system to replace the current laser interferometer measurement system with a more cost efficient optical encoder. This system was to be used in the Photometry Lab to measure the light properties of various components for the airplanes' interior cabin and ensure they were within FAA specifications. For this project I did the programming, bracket design, and electronics and presented my findings at the conclusion of my internship.