Research
Human-Drone Interaction
A Drone Teacher: Designing Physical Human-Drone Interactions for Movement Instruction (paper)
Multi-Robot Systems
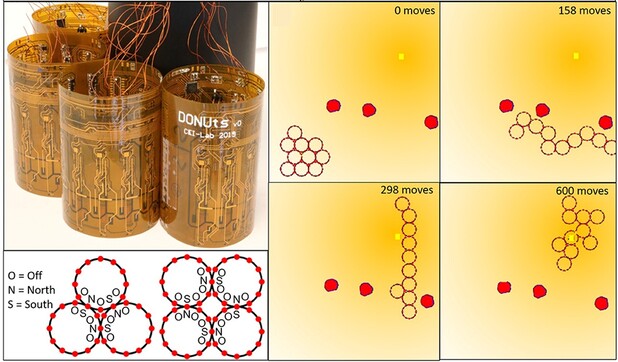
Abridged Abstract: A major goal of autonomous robot collectives is to robustly perform complex tasks in unstructured environments by leveraging hardware redundancy and the emergent ability to adapt to perturbations. In such collectives, large numbers is a major contributor to system-level robustness. Designing robot collectives, however, requires more than isolated development of hardware and software that supports large scales. Rather, to support scalability, we must also incorporate robust constituents and weigh interrelated design choices that span fabrication, operation, and control with an explicit focus on achieving system-level robustness. Following this philosophy, we present the first iteration of a new framework toward a scalable and robust, planar, modular robot collective capable of gradient tracking in cluttered environments. To support co-design, our framework consists of hardware, low-level motion primitives, and control algorithms validated through a kinematic simulation environment.
Undergraduate Research
Bellows Characterization for Dynamic Systems with Damping and Multiphase Flow (poster)
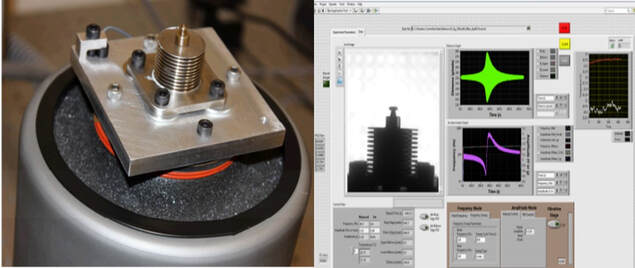
Abstract: The presence of gas bubbles in otherwise liquid-filled mechanisms can lead to unusual behavior when the system is vibrated. This is important for any system where gas-liquid systems are subject to vibration, for example in liquid-filled rocket fuel tanks, since the gas can form bubbles and create a multiphase mixture. The resonance of the system changes when gas is present. In order to understand and model this behavior, experiments were conducted with simple spring-mass-damper systems with pistons enclosed in silicon oil. However, these experiments proved very difficult to repeat since bubble sizes and locations could not be controlled from test to test. It was therefore decided to replace the gas with three different bellows types which were selected to have compressibility similar to the bubbles so that experiments could be run multiple times to gather sufficient data to gain statistical significance.
Publications
Nialah Jenae Wilson-Small, David Goedicke, Kirstin Petersen, and Shiri Azenkot. 2023. A Drone Teacher: Designing Physical Human-Drone Interactions for Movement Instruction. In Proceedings of the 2023 ACM/IEEE International Conference on Human-Robot Interaction (HRI '23). Association for Computing Machinery, New York, NY, USA, 311–320. https://doi.org/10.1145/3568162.3576985 (paper)
Nialah Jenae Wilson-Small, Louisa Pancoast, Kirstin Petersen, and Shiri Azenkot. 2023. Exploring Human-Drone Collaboration Through Contact Improvisation. In Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction (HRI '23). Association for Computing Machinery, New York, NY, USA, 97–101. https://doi.org/10.1145/3568294.3580050 (paper)
Nialah J. Wilson*, Steven Ceron*, Logan Horowitz, and Kirstin H. Petersen. “Scalable and Robust Fabrication, Operation, and Control of Compliant Modular Robots”, Scientific Frontiers special issue on Designing Self-Organization in the Physical Realm, doi: 10.3389/frobt.2020.00044, 2020. (paper) (video)
Steven Ceron, Nialah Wilson, Logan Horowitz, and Kirstin Petersen. “Comparative Analysis of Sensors in Rigid and Deformable Modular Robots for Shape Estimation”, Intl. Symp. for Multi-Robot and Multi-Agent Systems (MRS), 2019. (paper)
Steven Ceron*, Logan Horowitz*, Nialah Wilson, Claire Chen, Daniel Kim, and Kirstin Petersen. “Towards a Scalable, Self-Reconfigurable Robot with Compliant Modules”, extended abstract, Intl. Symp. for Multi-Robot and Multi-Agent Systems (MRS), 2019. (ext. abstract)
Wilson, Nialah Jenae. Bellows Characterization for Dynamic Systems with Damping and Multiphase Flow_njw. No. SAND2016-1457C. Sandia National Lab.(SNL-NM), Albuquerque, NM (United States), 2016. (poster)
Wilson, Nialah Jenae. Bellows Characterization for Dynamic Systems with Damping and Multiphase Flow. No. SAND2015-5830D. Sandia National Lab.(SNL-NM), Albuquerque, NM (United States), 2015. (poster)
Nialah Jenae Wilson-Small, Louisa Pancoast, Kirstin Petersen, and Shiri Azenkot. 2023. Exploring Human-Drone Collaboration Through Contact Improvisation. In Companion of the 2023 ACM/IEEE International Conference on Human-Robot Interaction (HRI '23). Association for Computing Machinery, New York, NY, USA, 97–101. https://doi.org/10.1145/3568294.3580050 (paper)
Nialah J. Wilson*, Steven Ceron*, Logan Horowitz, and Kirstin H. Petersen. “Scalable and Robust Fabrication, Operation, and Control of Compliant Modular Robots”, Scientific Frontiers special issue on Designing Self-Organization in the Physical Realm, doi: 10.3389/frobt.2020.00044, 2020. (paper) (video)
Steven Ceron, Nialah Wilson, Logan Horowitz, and Kirstin Petersen. “Comparative Analysis of Sensors in Rigid and Deformable Modular Robots for Shape Estimation”, Intl. Symp. for Multi-Robot and Multi-Agent Systems (MRS), 2019. (paper)
Steven Ceron*, Logan Horowitz*, Nialah Wilson, Claire Chen, Daniel Kim, and Kirstin Petersen. “Towards a Scalable, Self-Reconfigurable Robot with Compliant Modules”, extended abstract, Intl. Symp. for Multi-Robot and Multi-Agent Systems (MRS), 2019. (ext. abstract)
Wilson, Nialah Jenae. Bellows Characterization for Dynamic Systems with Damping and Multiphase Flow_njw. No. SAND2016-1457C. Sandia National Lab.(SNL-NM), Albuquerque, NM (United States), 2016. (poster)
Wilson, Nialah Jenae. Bellows Characterization for Dynamic Systems with Damping and Multiphase Flow. No. SAND2015-5830D. Sandia National Lab.(SNL-NM), Albuquerque, NM (United States), 2015. (poster)
Presentations
Wilson, N., (2021) Designing Tactile Human-Drone Interactions for Movement Instruction. STEMNoire Conference, Virtual
Wilson, N. and Ceron, S. (2019). Design and Control of the DONUts: A Scalable Self-Reconfigurable Robot with Compliant Modules. Cornell University Computer Systems Lab Speaker Series, Ithaca, NY
Wilson, N. and Ceron, S. (2019). Design and Control of the DONUts: A Scalable Self-Reconfigurable Robot with Compliant Modules. Cornell University Robotics Seminar, Ithaca, NY
Wilson, N. (2018). Design and Coordination of Flexible Modular Robots. RSS: Women in Robotics Workshop, Pittsburgh, PA
Wilson, N. (2018) Design, Evaluation, and Validation of Controllers for Decision Making and Planning in Large-Scale Distributed Systems. Cornell University Robotics Seminar, Ithaca, NY
Wilson, N. (2016) Bellows Characterization for Dynamic Systems with Damping and Multiphase Flow. Emerging Researchers National Conference in STEM, Washington, DC
Wilson, N. (2015). Bellows Characterization for Dynamic Systems with Damping and Multiphase Flow. Sandia National Laboratories Intern Symposium, Albuquerque, NM
Wilson, N. and Ceron, S. (2019). Design and Control of the DONUts: A Scalable Self-Reconfigurable Robot with Compliant Modules. Cornell University Computer Systems Lab Speaker Series, Ithaca, NY
Wilson, N. and Ceron, S. (2019). Design and Control of the DONUts: A Scalable Self-Reconfigurable Robot with Compliant Modules. Cornell University Robotics Seminar, Ithaca, NY
Wilson, N. (2018). Design and Coordination of Flexible Modular Robots. RSS: Women in Robotics Workshop, Pittsburgh, PA
Wilson, N. (2018) Design, Evaluation, and Validation of Controllers for Decision Making and Planning in Large-Scale Distributed Systems. Cornell University Robotics Seminar, Ithaca, NY
Wilson, N. (2016) Bellows Characterization for Dynamic Systems with Damping and Multiphase Flow. Emerging Researchers National Conference in STEM, Washington, DC
Wilson, N. (2015). Bellows Characterization for Dynamic Systems with Damping and Multiphase Flow. Sandia National Laboratories Intern Symposium, Albuquerque, NM